Online vs. Optimal Electrical Vehicle Charging
How close can a simple, computation-free charging rule get to the cost-optimal policy for an EV facing uncertain trips and fluctuating electricity prices?
The ideas and work here are my own. An AI assistant (Claude Sonnet 5) helped with the write-up.
Electric vehicles are a fast-growing load on the grid, and how a single car is charged matters both for the driver's bill and for the system as a whole. The problem is a trade-off under uncertainty: the battery should be full whenever the driver needs it, but recharging is slow and electricity prices fluctuate over the day, so the car cannot simply be topped up right before departure. A good charging policy has to balance vehicle availability against energy cost when both the next trip and the price are unknown in advance.
I formulated the single-vehicle charging problem as a finite-horizon Markov Decision Process and solved it exactly by backward induction to obtain the cost-optimal policy, minimizing expected future cost at every state and time over the charging action :
That policy is not something you would run online, since it needs the full model and a heavy offline computation, so I used it purely as a reference. Against it I benchmarked seven heuristic rules that require no offline computation, computing the exact expected cost of each by policy evaluation on the same MDP.
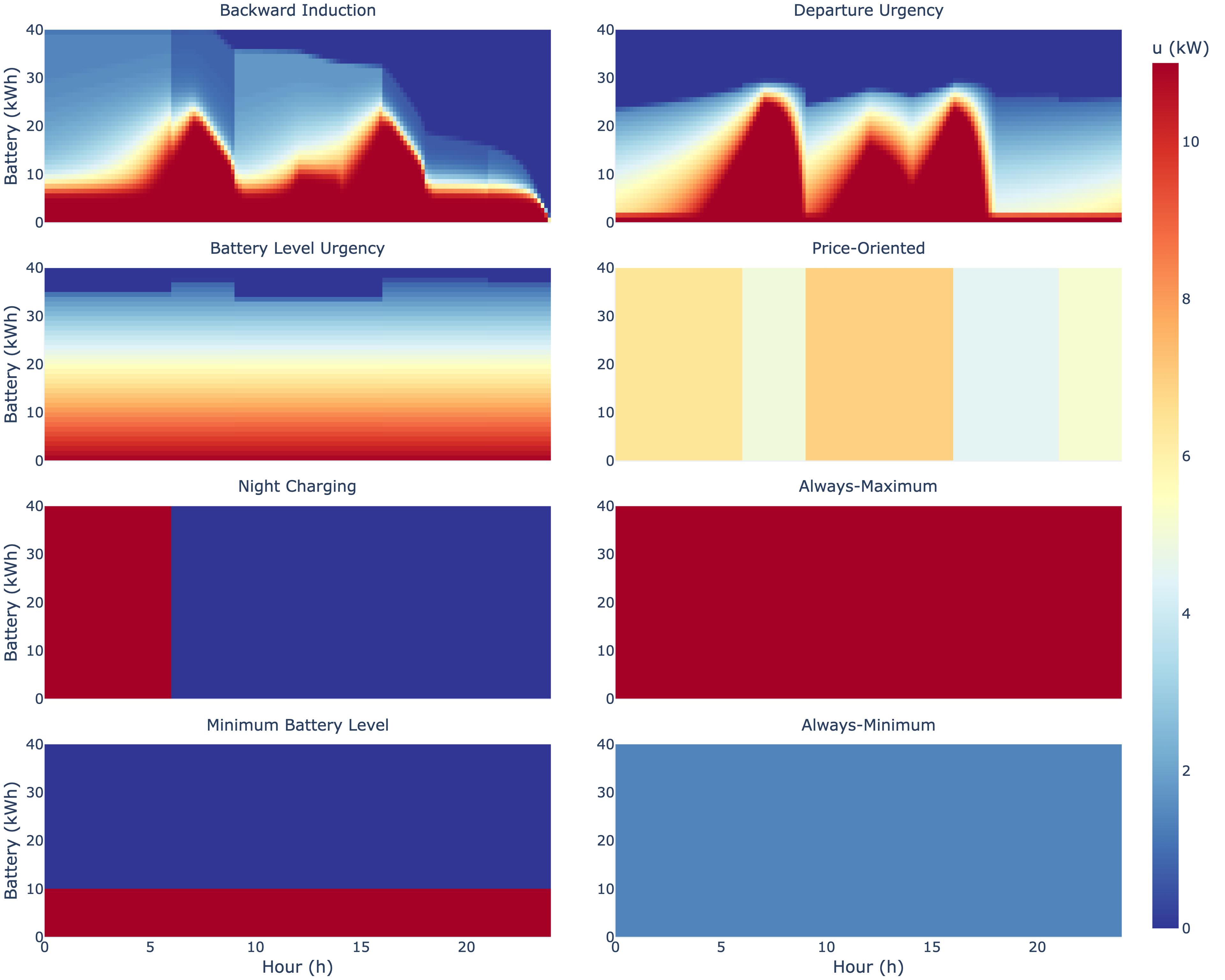
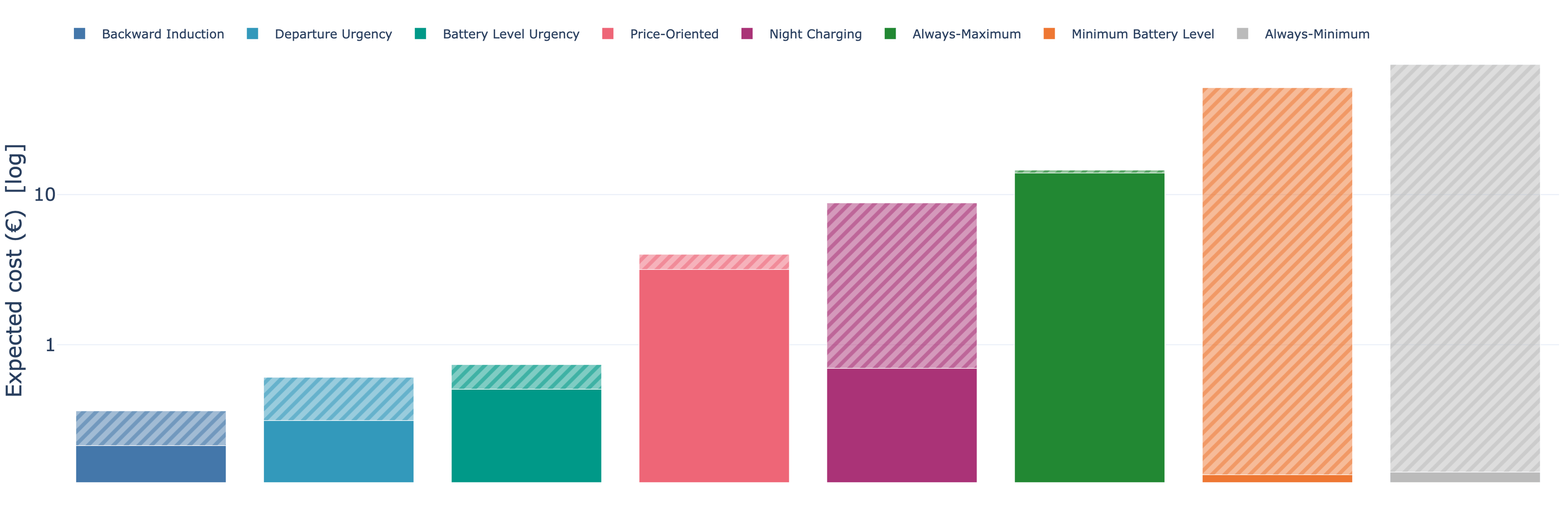
The central finding is that a computation-free rule can come close to the optimum, but only if it reasons over the right signals: the electricity price, the battery state of charge, and the time to the next departure. My best heuristic, Departure Urgency, folds all three into a single ratio comparing the energy still needed against the time left to the next expected departure :
It charges whenever the price is cheap relative to , and reaches the optimum to within about 67% in the baseline while reproducing its structure: front-loading charge ahead of likely trips and treating price only as a secondary signal. This is essentially a systematic version of "charge before trips, prefer cheap hours". Rules that track only one side of the trade-off, or follow a fixed schedule, are worse by one to several orders of magnitude.
To test how far this holds, I added a negative-binomial trip-duration model for more realistic trips and a set of electricity-price models estimated from historical ENTSO-E data, then ran a sensitivity study across 28 configurations. The ranking is robust: Departure Urgency is the best heuristic in 22 of them, and the parameters that matter most are the penalty for unserved demand, the trip-duration model, and the departure profile. The takeaway is that for this model, a cheap online rule reasoning over price, charge, and time to the next departure captures much of what the exact optimal policy achieves.